



У складишту постоје различите врсте полица за складиштење, а методе складиштења и преузимања су углавном подељене у следеће категорије, укључујући ручно складиштење и преузимање, складиштење и преузимање виљушкаром и аутоматско складиштење и преузимање. Данас многа предузећа желе да реализују аутоматизован рад складишта, па желе да користе аутоматизоване складишне полице. На пример, четворосмерни сталак за аутомобиле је врста аутоматизованог полица за складиштење. Како четворосмерни шатл АГВ улази и излази из складишта? Фабрика за производњу тешких полица Хаигрис анализирала је складиште.

Четири правца шатл складиште
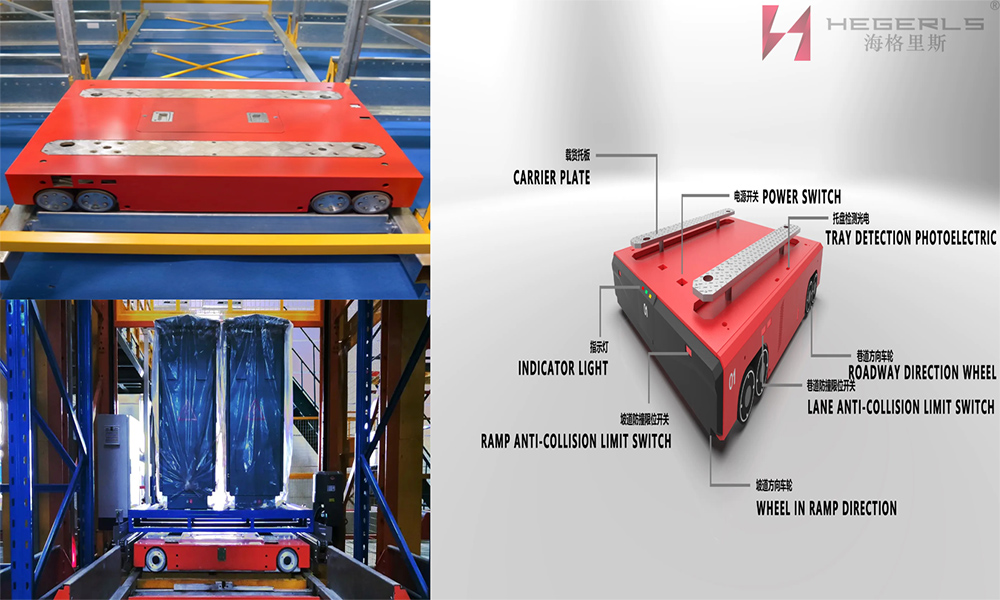
Четворострани шатл вагон је опремљен са 12 точкова, који могу да путују у четири правца дуж равни стазе и слободно доспеју до било ког теретног простора на складишном авиону. Четворострани шатл се истовремено покреће помоћу точкова са обе стране како би се осигурало да се каросерија аутомобила не скреће током рада, а може да се креће наизменично дуж уздужних и попречних шина на тродимензионалној полици.

У исто време, четворосмерни шатл је интелигентни уређај за руковање који може да хода не само уздужно већ и бочно. Четворострани шатл има високу флексибилност, може мењати радни коловоз по жељи и прилагођавати капацитет система повећањем или смањењем броја шатл аутомобила. Ако је потребно, на вршну вредност система може се одговорити успостављањем режима распореда радног тима возила, решавањем уског грла операција уласка и изласка, а могу се и међусобно заменити. шатл или лифтови се могу отпремити кроз диспечерски систем како би наставили са довршавањем операције без утицаја на капацитет система. Овај уређај је погодан и за складиштење са малим протоком и за складиштење велике густине, као и за складиштење великог протока и велике густине. Може постићи већу ефикасност, трошкове и ресурсе.
Како четворосмерни шатл АГВ улази и излази из складишта?

1) Начин складиштења
а) Техничари интелигентног четворосмерног шатла прво укључују интелигентни четворосмерни шатл и припремају га. Интелигентни четворосмерни шатл је у стању приправности;
б) Након што потврди локацију преузимања интелигентног четворосмерног шатла, ВЦС ће планирати руту вожње према тренутној локацији и одредишној локацији интелигентног четворосмерног шатла, а затим ће особље дистрибуирати робу интелигентном четворосмерном шатлу шатл кроз ВЦС;
ц) Интелигентни четворосмерни шатл почиње да извршава задатак испоруке према примљеној команди задатка;
д) На прелазној стази, интелигентни четворосмерни шатл путује у режиму померања кроз стварну удаљеност. Током процеса вожње, непрекидно скенира трагове кроз које пролази доњи део каросерије возила. Сваки прелаз који прође, он процењује и калибрише раздаљину коју пређе скенирањем трагова. Када је близу одредишта, фино подешава позицију за паркирање преко бочног ласерског сензора да би се постигло тачно позиционирање паркинг позиције;
е) У подканалу, интелигентни четворосмерни шатл може скенирати попречну стазу и рефлектор бочног калибрационог огледала, проценити и проверити раздаљину вожње скенирањем позиције тачке и постићи тачну контролу позиционирања у подканалу како би стигао до одредишта;
ф) Када интелигентни четворосмерни шатл стигне на изабрану позицију за комисионирање, палета се спушта, роба се поставља на полицу, а ВЦС систем је обавештен о завршетку задатка испоруке;
г) Интелигентни четворосмерни шатл наставља да прима упутства о задатку или се враћа у зону приправности.
2) Начин испоруке
а) Техничари интелигентног четворосмерног шатла прво укључују интелигентни четворосмерни шатл и припремају га. Интелигентни четворосмерни шатл је у стању приправности;
б) Након потврде локације брања интелигентног четворосмерног шатла, ВЦС ће планирати руту вожње према тренутној локацији и одредишној локацији интелигентног четворосмерног шатла, а затим ће особље послати задатак брања на интелигентну четворку. - шатл кроз ВЦС;
ц) Интелигентни четворосмерни шатл почиње да преузима робу према примљеној команди задатка;
д) На прелазној стази, интелигентни четворосмерни шатл путује у режиму померања кроз стварну удаљеност. Током процеса вожње, непрекидно скенира трагове кроз које пролази доњи део каросерије возила. Сваки прелаз који прође, он процењује и проверава раздаљину коју пређе скенирањем трагова. Када се приближава одредишту, фино подешава позицију паркирања преко бочног ласерског сензора како би постигао прецизну контролу позиционирања и паркирања;
е) У подканалу, интелигентни четворосмерни шатл аутомобил скенира попречну стазу и рефлектор бочног калибрационог огледала, процењује и калибрише раздаљину вожње скенирањем ових тачака и остварује контролу прецизног позиционирања у подканалу како би стигао до одредишта .
Време поста: 19.09.2022